Principle and Independent Component Analysis
Independent Component Analysis (ICA) is an unsupervised learning method, and if you haven’t heard of it, you’ve probably heard of its more famous cousin Principle Component Analysis (PCA). PCA has a high ratio of usefulness to mathematical difficulty, and it’s often introduced as a paradigmatic example of unsupervised learning. ICA is not as straightforward, but that also means it seems even more like magic. Consider this picture from The Elements of Statistical Learning [1]:
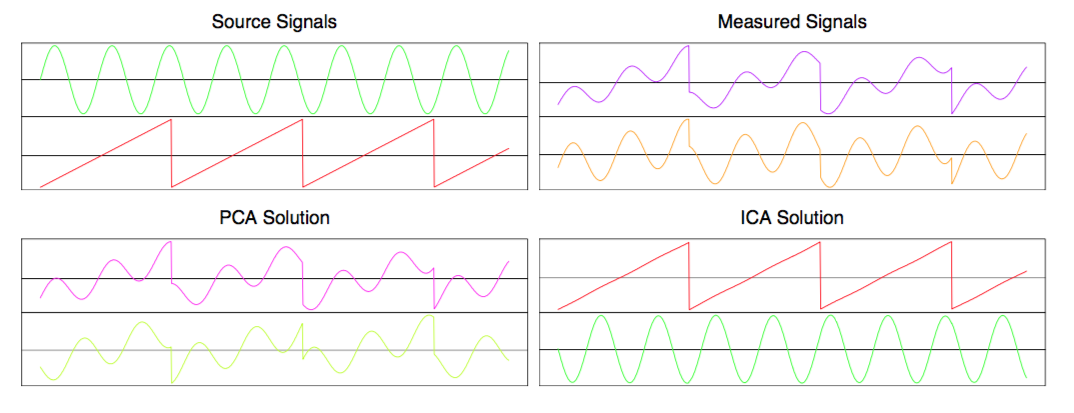
Clearly PCA is hopeless at separating the two signals, whereas ICA recovers them perfectly. Given that PCA is usually presented alongside examples that clearly illustrate its utility, and make PCA itself seem magical, this example only made ICA seem even more mysterious and magical. Furthermore, I was wondering if it was related to PCA–their names couldn’t just be a coincidence, right? So I decided to dive in and write up my thoughts here. But before we investigate ICA, we should familiarize ourselves with its simpler cousin, PCA.
Unsupervised learning
PCA is a form of unsupervised learning. I’m going to motivate PCA by first discussing the rationale for unsupervised learning.
One way to think about unsupervised learning is as a transformation process. You are given a bunch of data, and you want to transform it to another representation, where you can “interpret” it better. What does “interpret” mean? Well, the data will probably be “re-grouped” within this other representation of the data. “Interpret” means that you assign some meaning to the groups within this representation. In other words, you create a higher-level abstraction, and use your label for that abstraction to stand for some of the data. You’re using something simple, like a word, to represent something unwieldy, like a relationship between lots and lots of numbers.
You do this so that in the future, if you’re reasoning at a higher level and this abstraction happens to play a role, you can plug in your labeled data, which you already used unsupervised learning to isolate.
Here’s a concrete example of this: You’re in kindergarten. The teacher is saying something about an “alphabet”, and shows you an image with weird drawings on it. This is your data. You learn that there are 26 drawings, and you learn to tell them apart. Then, your teacher creates the abstractions of the letters A-Z, and helped you assign a label–the name of a letter–to each of the 26 different shapes. This is you doing unsupervised learning. You’re using something simple, like the sound “ay”, to stand for the up-pointing shape with a line through the middle.
In first grade, let’s say you need to write down your name. If you know that your name starts with the letter A, you’re all set. The unsupervised learning you did in kindergarten means that you know what visual data corresponds to the abstraction A–an up-pointing shape with a line through the middle. You draw this on your paper, and then loop through the rest of the letters in your name.
PCA in Words
Let’s try to get more concrete, and move from talking about unsupervised learning to PCA in particular. Above, I said unsupervised learning is a transformation process. Given some data, you want to transform it to another representation. There are two avenues to making this statement more concrete: answering “transform it how?” and answering “what criteria do you want this other representation to have?”
The simplest thing to consider at first might be linear transforms. This means that given some data, we’re only going to transform it by multiplying the numbers in that data by some constants, and/or adding the results of those multiplications together. Another way to understand this is by representing each data point as a vector, where the elements of the vector are the values of each attribute of the data point (I’m assuming multi-dimensional data for this post). By restricting yourself to linear transforms, you’re saying that you’re only going to multiply this vector by a matrix, and use the same matrix for all your data points. (The matrix itself can change depending on the entire data set, though).
Next, we have to specify the characteristics we want the transformed representation of the data to have. This is the interesting part. Behind many transformations are assumptions: you act as though a certain scenario is true, which allows you to actually do something to your data, and then when you’re finished transforming the data, you check to see if the output is actually consistent with the assumptions you made in the beginning. This is also the case for PCA.
We’re going to assume that the data is generated by a number of ‘sources’. Each source outputs a signal that various measurement devices of ours pick up. You can think of the reading of each measurement device as one element of our data. For example, each ‘source’ could be the voice of certain people in a room, and our measurement devices could be a series of microphones [2]. Each microphone is placed in a different location in the room. Since every person is a different distance from all of the microphones, each source is picked up in a unique way by each of the microphones. Mathematically, a signal from a given source is attenuated by a constant factor when it is picked up by a given microphone. For a given source, the set of these factors tell you how our measurement devices pick up its signal. If you consider the vector space where our data lives, this set of factors picks out a unique direction in this space. If we knew this set of factors, equivalent to a unit vector in this space, we could filter out the contents of that signal from data that could have been generated by more than one source.
In other words, if we just assume that the signal from every source is picked up by a measurement device, after being scaled by a source- and measurement device- dependent factor, and that signals from different sources merely add, then we can use PCA to tell apart the signals from different sources.
To specify the criterion for the transformed representation, we need one more innocuous-seeming assumption: that observing the signal from one source should tell us absolutely nothing about the signal from another source. Surprisingly, this requirement can be turned into the mathematical criterion we need.
In the scenario where we’re trying to distinguish the voices of different people in the same room by using the measurements of various microphones scattered throughout the room, our criterion is that what Alice is saying has absolutely nothing to do with what Bob is saying. In other words, by paying attention to what Alice says, we are no better off in predicting what Bob is saying. The signal from one source doesn’t help us predict the signal from another source– this is what is meant by “the sources are statistically independent”.
How can we make this into something mathematical we can code up? By using the language of probability. We’re observing a signal from multiple sources . (Since these are random variables, I’m putting an next to them.) At any given instant, the signals from every source can be combined into a vector , where each element is one of the signals . Think of the vector as being drawn from a multivariate probability distribution .
Now, the key point: if the sources were generating truly independent signals, then the multivariate probability distribution , from which you draw a vector consisting of all the measurements, would factorize into the product of single-variable probability distributions for each source. Mathematically,
\begin{equation} P(\mathbf{s}^R) = P_1(s_1^R) \cdot P_2(s_2^R) \cdot\; \cdots\; \cdot P_m(s_m^R) \end{equation}
where each is the probability distribution you draw from when measuring the signal from source , and where is the number of sources.
This suggests that the mathematical criterion we look for in the transformed data is complete factorization of the joint probability distribution over the variables . However, although the criterion is now stated in terms of math, it’s not clear how to evaluate whether it’s satisfied, much less look for a transformation that satisfies the criterion. We’ll see how to accomplish those tasks when we get to implementing PCA and ICA.
PCA in Math
Let’s get even more concrete, and describe the procedure in terms of linear algebra. We start with a bunch of -dimensional data ( was also the number of sources). Let’s make things simple and assume the dimensionality of the data and the number of sources is the same, for now. Let’s also assume that the data points form a time series; in other words, you can arrange them in order so that they represent a set of evenly spaced measurements taken seconds apart, where is an unknown but also unimportant constant. This second assumption isn’t necessary for the analysis below to hold, but it makes things easier to interpret.
Each data point is a column vector with elements. If we smash our data points together, arranging the column vectors from left to right, we get an matrix , called the design matrix. is the number of data points we have. If you look at one row in the design matrix, it represents the value of a particular measurement across data points; in our voice- microphone setup described above, one row represents what a given microphone picked up across all the data points. Since our data forms a time series, if we arrange them in order to form , we can think of one row as representing the sound a given microphone picked up for the duration of our measurement. Conversely, if you look at one column, it represents all measurements for a single data point, so those numbers tell you what all the microphones picked up at one given instant.
Remember how we planned to transform the data: through applying linear transforms. Mathematically, this means that our transformed data can be represented as
\begin{equation} \mathbf{S} = \mathbf{TX}. \end{equation}
is a matrix, analogous to the design matrix , but where every row represents (we hope) one of the sources. We’ve taken the rows of and swapped microphones for voices. If we read across one row of , we’ll know exactly what the signal from the source corresponding to that row was (equivalently, what one of the voices was saying the whole time, without any interference from the other voices). This is our goal.
All linear transformations can be represented by multiplying by a matrix, so is our transformation matrix. By necessity, its shape is . If you think about the matrix multiplication, you can interpret as follows: if you want to know about a certain source, find the row in (the same row as in ) that corresponds to that source. To find the strength of the signal from that source at the th time point ( goes from 1 to , the number of measurements), dot the vector represented by this row into the th column of (since is , the th column also represents a vector of length ). And if you want the complete signal from that source, dot the same row into every column of and arrange the resulting numbers in order.
This means that each row of represents some linear combination of the measurements picked up by each microphone. Weighing the measurements by the entries in a given row yields the signal produced by the source corresponding to that row of . Each row of corresponds to one of the sources.
Now that we have a starting point, how should we proceed? Recall the second criterion of our transformation procedure–we’re assuming that all the sources are “statistically independent”. There’s another mathematical consequence of this that we didn’t go into above. You may have heard of another word used to describe variables that are supposed to be unrelated: “uncorrelated”. People often talk about how phenomena that are observed at the same time are “correlated”–for example, rates of smoking and lung cancer are correlated. It also crops up in the statement that “correlation and causation are not the same” (but many times they both are present, as in the smoking example). In everyday conversation people loosely use “correlation” to mean that if you see one of the phenomena, the other will likely be present as well. But, mathematically, “correlation” usually means “linear correlation” (this is what the “correlation coefficient” measures).
The reason we chose to use the phrase “statistically independent” in our criterion is because it’s more general than “linearly uncorrelated”. In particular, if two variables are statistically independent, it automatically implies that they’re linearly uncorrelated. But just because two variables are linearly uncorrelated, doesn’t mean that they’re statistically independent.
However, it turns out that it’s a little complicated to use the assume that the sources are statistically independent. Let’s just stipulate that our sources are linearly uncorrelated for now. Mathematically, this means that
\begin{equation} \mathrm{Cov}(\mathbf{s}_i,\mathbf{s}_j) = 0 \end{equation}
for every pair (except when , which won’t be 0 unless the signal from that source is itself 0). Can we use this equation to help us? Almost. Let’s unpack the function:
\begin{equation} \mathrm{Cov}(\mathbf{s}_i, \mathbf{s}_j) = \langle \mathbf{s}_i\mathbf{s}_j \rangle - \langle \mathbf{s}_i \rangle \langle \mathbf{s}_j \rangle \end{equation}
Now we’ll fill in some values. We just said above that , so let’s replace the left side with 0:
\begin{equation} 0 = \langle \mathbf{s}_i\mathbf{s}_j \rangle - \langle \mathbf{s}_i \rangle \langle \mathbf{s}_j \rangle \end{equation}
Rearranging, we can write
\begin{equation} \langle \mathbf{s}_i\mathbf{s}_j \rangle = \langle \mathbf{s}_i \rangle \langle \mathbf{s}_j \rangle \end{equation}
Can we use this equation to help us develop an expression for $S$ or $T$? Yes. The and that appear above are just the different rows of , and the expression is essentially (but not exactly) a dot product between different rows of . The only other equation we have is , so we need to get dot products between rows of to appear in this equation. Fortunately, that’s exactly what right- multiplying by the transpose of a matrix does, so we’ll do that to both sides.
\begin{equation} SS^T = (TX)(TX)^T = (TX)(X^TT^T) = TXX^TT^T \end{equation}
Look at the term . Since is , is an matrix where each entry is a dot product between two of the rows of . In other words, the innards of look like this:
\begin{equation} SS^T = \begin{pmatrix} \mathbf{s}_1\bullet \mathbf{s}_1 & \mathbf{s}_1\bullet \mathbf{s}_2 & \mathbf{s}_1\bullet \mathbf{s}_3 & \cdots \\ \mathbf{s}_2\bullet \mathbf{s}_1 & \mathbf{s}_2\bullet \mathbf{s}_2 & \mathbf{s}_2\bullet \mathbf{s}_3 & \cdots \\ \mathbf{s}_3\bullet \mathbf{s}_1 & \mathbf{s}_3\bullet \mathbf{s}_2 & \mathbf{s}_3\bullet \mathbf{s}_3 & \cdots \\ \vdots & \vdots & \vdots & \ddots \end{pmatrix} \end{equation}
Now, what’s the difference between and ? To review, the former actually is a dot product, like in physics: it means you do element-wise multiplication of the two vectors, and add the results up to get one number.
The latter is an average, like in statistics:
The only difference between the two is an extra factor of in . So we can convert into by pulling out a factor of :
\begin{equation} SS^T = n \cdot \begin{pmatrix} \langle \mathbf{s}_1 \mathbf{s}_1\rangle & \langle \mathbf{s}_1 \mathbf{s}_2\rangle & \langle \mathbf{s}_1 \mathbf{s}_3\rangle & \cdots \\ \langle \mathbf{s}_2 \mathbf{s}_1\rangle & \langle \mathbf{s}_2 \mathbf{s}_2\rangle & \langle \mathbf{s}_2 \mathbf{s}_3\rangle & \cdots \\ \langle \mathbf{s}_3 \mathbf{s}_1\rangle & \langle \mathbf{s}_3 \mathbf{s}_2\rangle & \langle \mathbf{s}_3 \mathbf{s}_3\rangle & \cdots \\ \vdots & \vdots & \vdots & \ddots \end{pmatrix} \end{equation}
Now we can use the equation to simplify the matrix. But remember that that equation is true only when and are different. When and are the same, this term becomes the average of the square of . Now the matrix looks like
\begin{equation} SS^T = n \cdot \begin{pmatrix} \langle \mathbf{s}_1^2 \rangle & \langle \mathbf{s}_1\rangle \langle \mathbf{s}_2\rangle & \langle \mathbf{s}_1 \rangle \langle \mathbf{s}_3\rangle & \cdots \\ \langle \mathbf{s}_2\rangle \langle \mathbf{s}_1\rangle & \langle \mathbf{s}_2^2\rangle & \langle \mathbf{s}_2\rangle \langle \mathbf{s}_3\rangle & \cdots \\ \langle \mathbf{s}_3 \rangle \langle \mathbf{s}_1\rangle & \langle \mathbf{s}_3 \rangle\langle \mathbf{s}_2\rangle & \langle \mathbf{s}_3^2 \rangle & \cdots \\ \vdots & \vdots & \vdots & \ddots \end{pmatrix} \end{equation}
Can we massage this matrix any further? Are there any further assumptions we can make about the data or the sources that will let us progress? Well, notice that the off-diagonal terms are products involving all the means of the sources. What we can do is to set all of the means to 0.
You might be suspicious about making this simplification, since the mean seems like a pretty important piece of information about a signal. But if you take the point of view of physically making measurements, you’ll realize that you’re always measuring a signal relative to some baseline level of noise. Subtracting that constant noise from your measurements corresponds to shifting the mean of the measured signal, and this is something you or your measurement devices do all the time.
If we set all the means to 0, the off-diagonal terms in the matrix become 0. We end up with
\begin{equation} SS^T = n \cdot \begin{pmatrix} \langle \mathbf{s}_1^2 \rangle & 0 & 0 & \cdots \\ 0 & \langle \mathbf{s}_2^2\rangle & 0 & \cdots \\ 0 & 0 & \langle \mathbf{s}_3^2 \rangle & \cdots \\ \vdots & \vdots & \vdots & \ddots \end{pmatrix} = TXX^TT^T \end{equation}
Notice that this matrix is diagonal. That means we can interpret T as a matrix that rotates to a new basis where it becomes diagonal. In other words, to find , the transformation matrix, we need to diagonalize . Now the problem is reduced to a familiar procedure.
Once is diagonalized, we can use its eigenvectors to reassemble the matrix . Then, all we need to do is multiply the design matrix by , and we’ll have recovered the sources, accomplishing our goal.
References
[1] Hastie, Tibshirani, Friedman, The Elements of Statistical Learning
[2] Shlens, A Tutorial on Independent Component Analysis, arXiv:1404.2986v1